






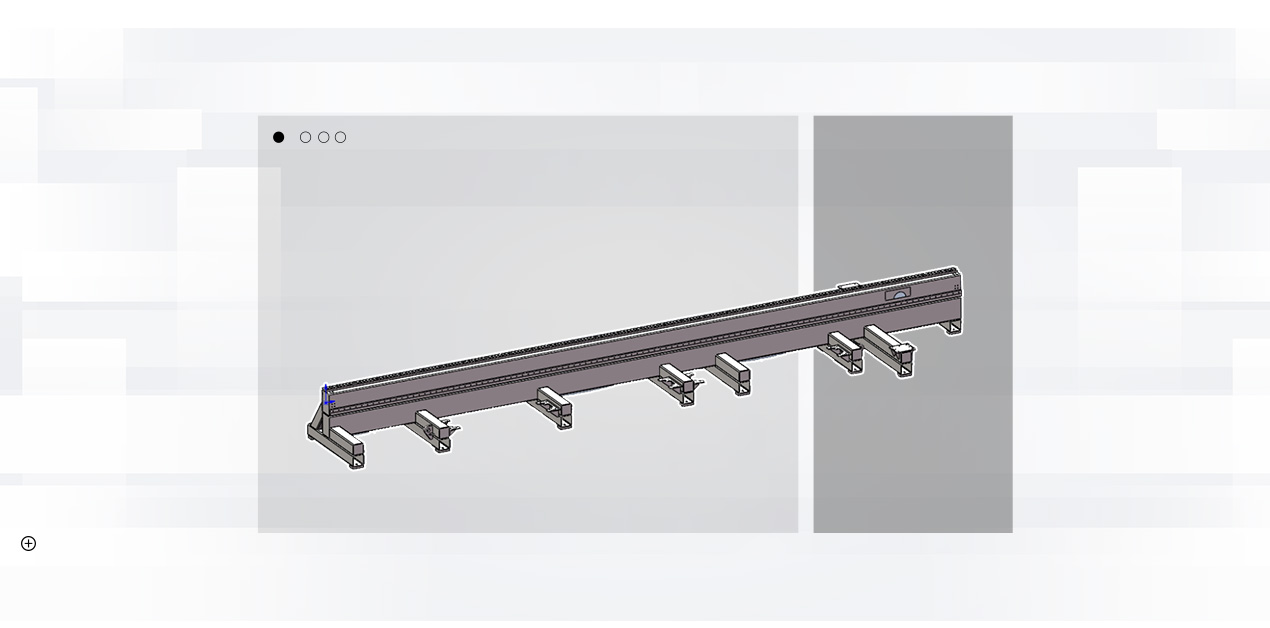
Pat sudat dintr-o singură bucată cu structură suspendată lateral
Patul adoptă o structură cu suspensie laterală și un pat sudat dintr-o singură piesă, recopt pentru a elimina tensiunile interne. După prelucrarea brută, se efectuează o îmbătrânire prin vibrații înainte de finisarea prelucrării, îmbunătățind astfel considerabil rigiditatea și stabilitatea mașinii-unelte și asigurând precizia acesteia. Acționarea servomotorului de curent alternativ este controlată de sistemul de control numeric, iar mandrina realizează o mișcare alternativă în direcția Y după acționarea motorului, realizând o mișcare rapidă și o mișcare de alimentare. Atât cremaliera pe axa Y, cât și șina de ghidare liniară sunt fabricate din produse de înaltă precizie, care garantează eficient precizia transmisiei; întrerupătoarele de limită de la ambele capete ale cursei sunt controlate și este instalat simultan un dispozitiv de limitare fixă, care asigură eficient siguranța mișcării mașinii-unelte; mașina-unealtă este echipată cu un dispozitiv automat de lubrifiere care adaugă ulei lubrifiant în piesele mobile ale patului la intervale regulate pentru a se asigura că piesele mobile funcționează în stare bună, ceea ce poate îmbunătăți durata de viață a șinelor de ghidare, a angrenajelor și a cremalierelor.
Dispozitiv de alimentare frontală
Dispozitivul de alimentare frontal include o placă de susținere controlată de un cilindru pneumatic, care susține țeava atunci când țeava tăiată este lungă și previne lăsarea acesteia.
Când piesa de prelucrat este tăiată, cilindrul de susținere ridicat susține placa de susținere pentru a susține țeava și a o împiedica să se lase. Când piesa de prelucrat este tăiată, toți cilindrii de susținere ridicați sunt retrași, iar piesa de prelucrat cade pe placa de obiecție și alunecă în locul de depozitare. Acțiunea cilindrului este controlată automat de sistem.
Secțiunea frontală este, de asemenea, împărțită în tip de urmărire și tip de ajustare manuală.

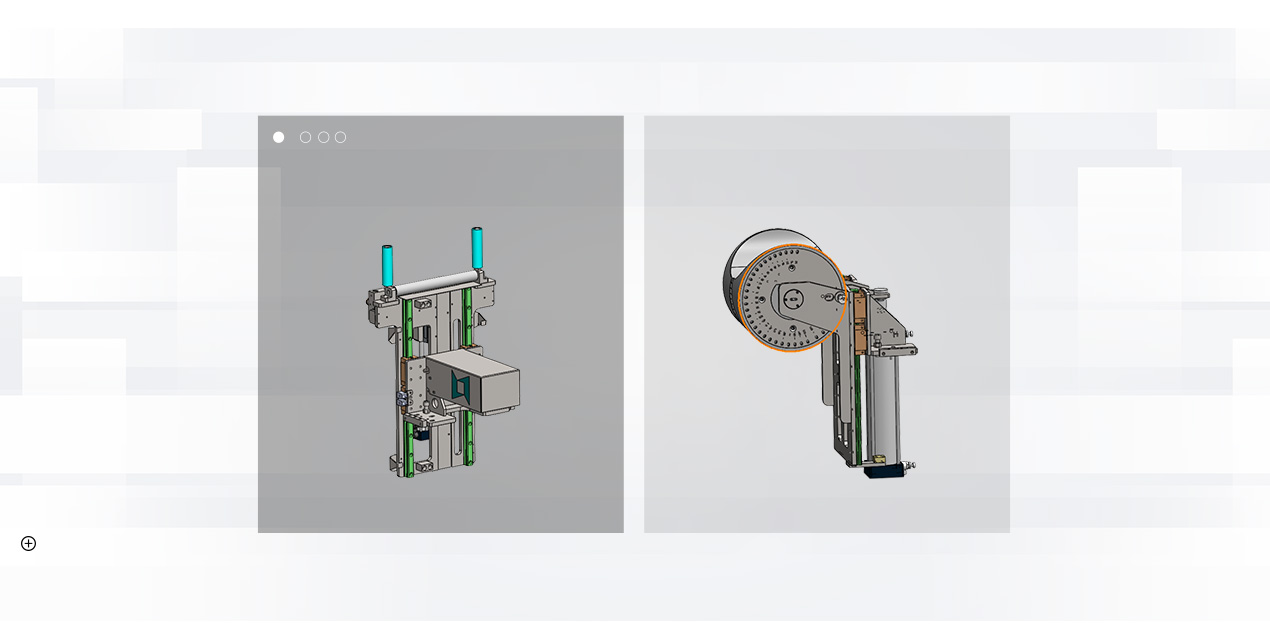
Mecanisme de suport
Există 3 seturi de mecanisme de susținere instalate pe pat, iar acestea sunt disponibile în două tipuri:
1. Suportul auxiliar este controlat de un servomotor independent pentru a se deplasa în sus și în jos, în principal pentru a efectua suport suplimentar în cazul deformării excesive a țevilor tăiate lungi (țevi cu diametre mici). Când mandrina spate se deplasează în poziția corespunzătoare, suportul auxiliar poate fi coborât pentru a evita deformarea.
2. Suportul roții cu diametru variabil este ridicat și coborât de cilindru și poate fi reglat manual la diferite poziții de scală pentru a susține țevi de diferite dimensiuni.
Chuck-Part
Mandrina este împărțită în două mandrine pneumatice cu cursă completă, față și spate, ambele putând fi deplasate în direcția Y. Mandrina spate este responsabilă pentru strângerea și alimentarea țevii, iar mandrina frontală este instalată la capătul patului pentru strângerea materialelor. Mandrinele față și spate sunt acționate respectiv de servomotoare pentru a realiza rotația sincronă.
Sub prinderea articulațiilor mandrinelor duble, se poate realiza tăierea cu coadă scurtă, iar coada scurtă a gurii poate ajunge la 20-40 mm, permițând în același timp tăierea cu coadă scurtă a cozii mai lungi.
Mașina de tăiat țevi din seria TN adoptă metoda de mișcare și evitare a mandrinei, care poate realiza tăierea cu două mandrine tot timpul și nu va face ca țeava să fie prea lungă și instabilă, iar precizia nu este suficientă.

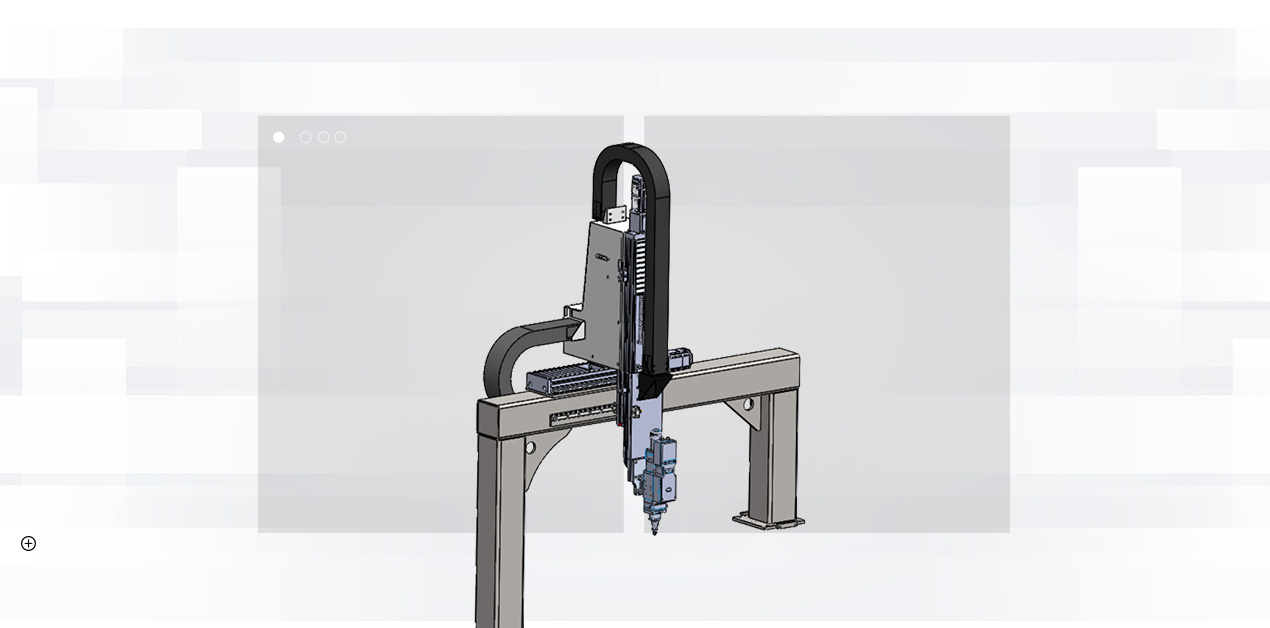
Axis-Device
Traversa dispozitivului pe axa X adoptă o structură de tip portal, sudată printr-o combinație de tub pătrat și placă de oțel. Componenta portalului este fixată pe pat, iar axa X este acționată de un servomotor pentru a acționa cremaliera și pinionul pentru a realiza mișcarea alternativă a plăcii glisante în direcția X. În procesul de mișcare, comutatorul de limită controlează cursa pentru a limita poziția și a asigura siguranța funcționării sistemului.
În același timp, axa X/Z are propriul capac de protecție pentru a proteja structura internă și a obține o protecție mai bună și efecte de îndepărtare a prafului.
Dispozitivul pe axa Z realizează în principal mișcarea în sus și în jos a capului laser.
Axa Z poate fi utilizată ca axă CNC pentru a efectua propria mișcare de interpolare și, în același timp, poate fi conectată la axele X și Y și poate fi, de asemenea, comutată la control ulterioar pentru a satisface nevoile diferitelor situații.
Avantajele mașinii de tăiere cu laser cu fibră pentru țevi metalice 62TN

-

Mașină de tăiere cu laser cu fibră TX124 2024 pentru aluminiu...
-
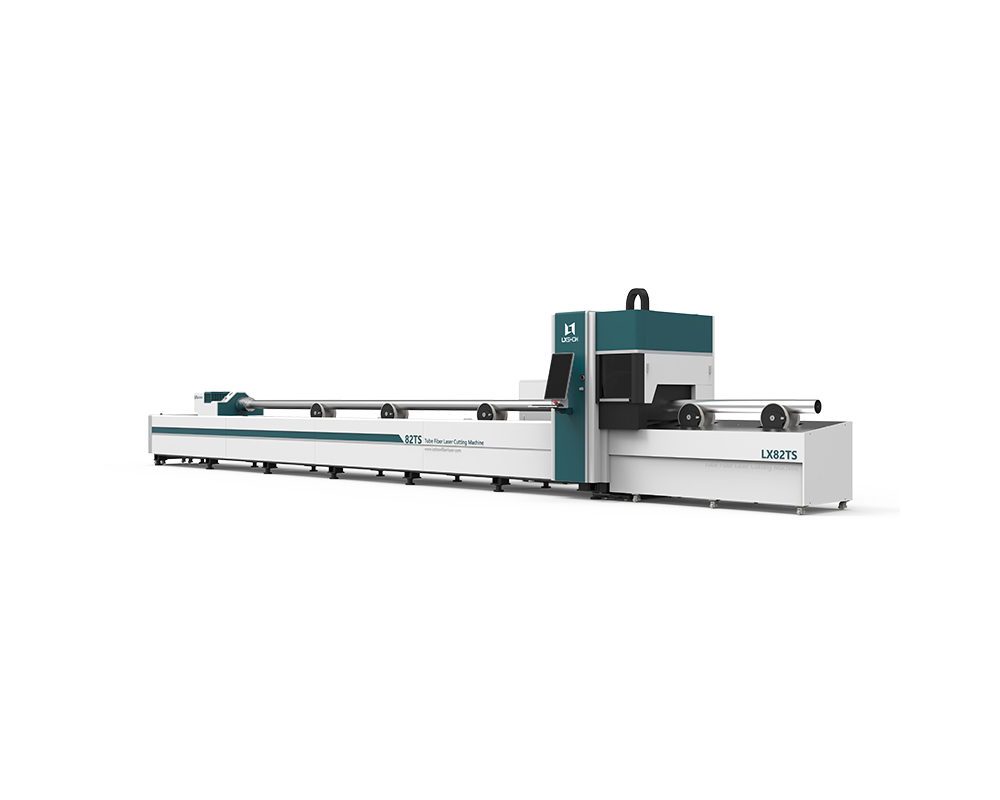
LX82TS Reducere 7% 1kw 1.5kw 3kw 4kw 6kw Fibră ...
-

LX123TX Cel mai bun laser cu fibră de mare putere cu trei mandrine...
-

Mașină de tăiat cu laser cu fibră pentru plăci metalice LX3015E cu Exc...
-

LX62TN Imprimare metal cu laser cu fibră semiautomată...
-

Mașină economică de tăiat țevi LX62TD 1-6KW P...











